焊接机器人集成系统中的周边设备及功能
焊接机械手机器人的构成除了有6轴机器人本体外,还有一套控制系统和焊接系统,这其中包含有焊接电源、焊枪及水冷系统、焊接软件系统等装置,在一些特殊情况下,还配置有起始点寻找及焊缝跟踪等系统。
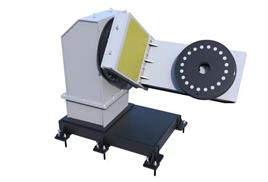
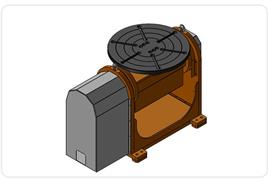
焊接机械手机器人的构成除了有6轴机器人本体外,还有一套控制系统和焊接系统,这其中包含有焊接电源、焊枪及水冷系统、焊接软件系统等装置,在一些特殊情况下,还配置有起始点寻找及焊缝跟踪等系统。 由此可以看出,若是想完成一项焊接作业的话,除了需要准备一台焊接机器人以外,还需要配备一些实用的周边设备,从而构成一个完整的机器人集成系统。 机器人集成系统的周边设备 说到机器人集成周边设备的设计,都是根据上机焊接的工件确定的,由于焊件的差异很大,所以所需的周边设备也存在很大的差异性。如果一定要区分的话,可以从用途角度分为三类,分别是简易型、工位变换型和协调焊接型。 如果是简易型设备的话,也就只能起到支持焊接机器人本体和装夹焊件的作用;如果说工位变换型,除了上述功能外,还具有工位变换功能;而协调焊接型是功能比较齐全的一类,因为它还包括有协调焊接的功能。 虽然说焊接机器人的技术已经成熟,价格也并不贵,但要是设计焊接机器人集成系统就不同了,由于上述提高的周边设备都是非标准的的,即便再简单,也需要耗费较大的成本。当然也有所谓经济型焊接机器人集成系统,就是由一台焊接机器人和一台或两台焊接变位机组成一个焊接工作单元,但它只能用到焊缝分布简单,焊接工作量大,焊接劳动强度大、焊接环境恶劣的工件的加工。 如果系统功能要求更强大一些,作业精度也要求更精一些,适用范围还要更广一些的话,弧焊机器人集成系统就需要配置更多的元件和装置,那相应的成本自然也会提高。